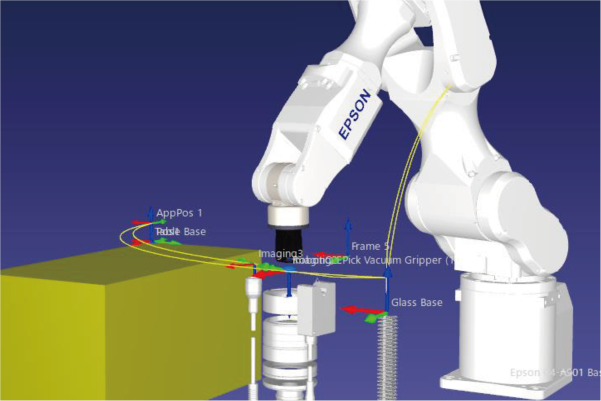
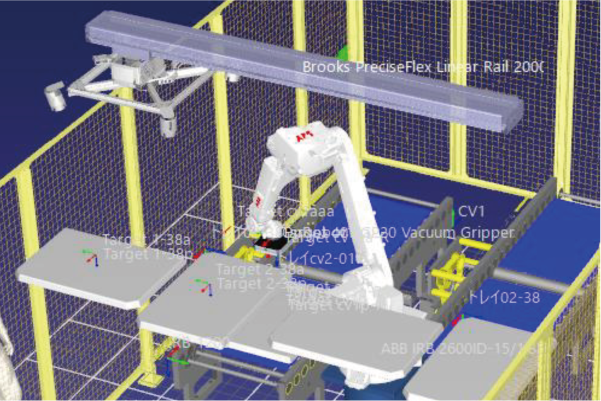
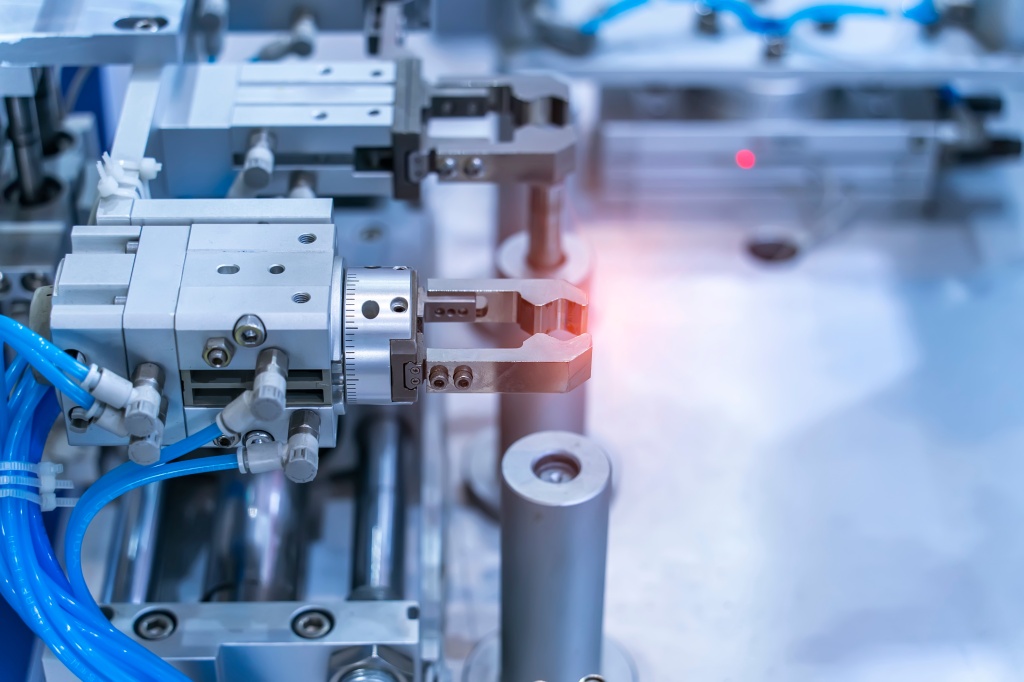
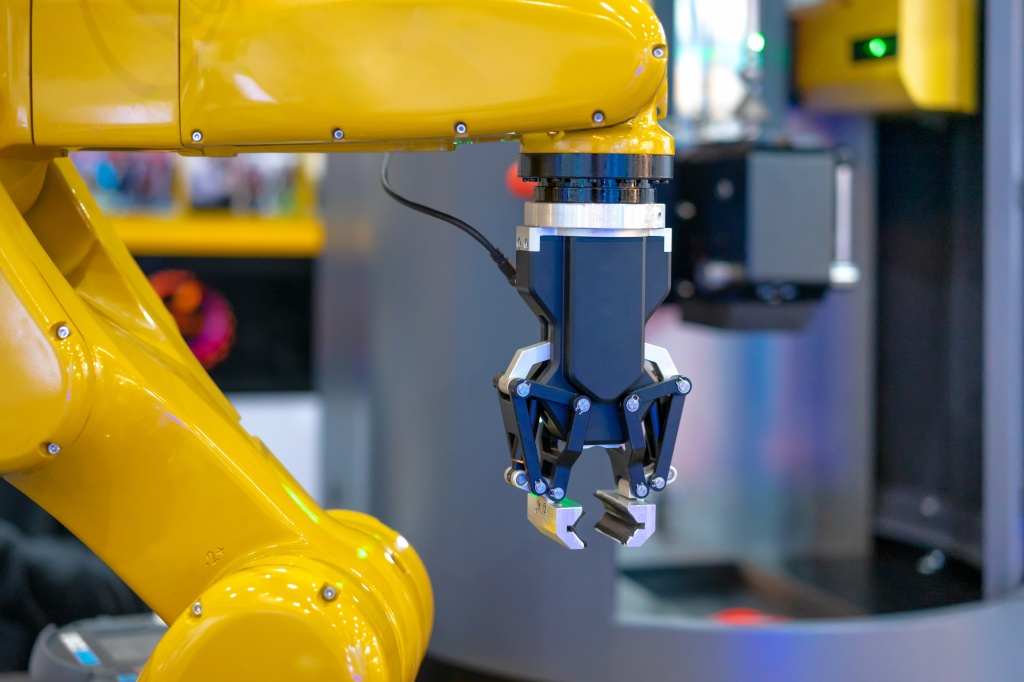
HOME SERVICE ロボット Robot ロボット ロボットの新しい使い方を ご提案します Independent of manufacturer We offer machine vision. マシンビジョンを搭載したロボットは、作業空間に応じた柔軟な作業を行う事が出来るようになります。これにより、作業・検査の自動化や効率化、品質向上などの利点をもたらします。また、協働ロボットを採用する事で、作業員の負担軽減や効率改善に貢献します。 検査ロボット 多能工ロボット 検査ロボット 多能工ロボット システム構築の流れ 導入事例 その他のサービス Inspection robot 検査ロボットのご提案 ロボットは高い精度で一連の検査工程を繰り返すことができます。人による見落としやばらつきを排除し、信頼性向上に貢献します。危険な環境での作業や、複数か所を異なった姿勢から撮像する必要のある検査項目も、ロボット利用によりリスクが低減されます。イニシャルコストはかかるものの、長期的には効率化と品質向上、労働環境の改善によりトータルコストを削減できます。 AIスマートカメラによる外観検査 ディープラーニングによる検査のモデル化 ロボットにAI スマートカメラを持たせ、ヒトが行っている官能試験を、ディープラーニングにて学習させることで、検査レベルがモデル化・定量化された立体物の外観検査が行えます。 レーザー変位センサーによる組付け検査 変位センサーによる形状測定 ロボットにレーザー変位センサーを持たせ、立体物の組付け状態(ワッシャーの有無・二枚入りなど)の不具合を検査します。 2D ロボットビジョン ロボットを止めずに撮像 ピックしたチップをカメラや各種判定センサー上をくぐらすことで、NG 判定・高精度アライメント処理を同時に行います。 3D ロボットビジョン 3Dビジョンカメラを移動させて撮像 固定式の3D ビジョンカメラを移動させることで、広い空間のワークに対応します。 Multi skilled robot 多能工ロボットのご提案 ロボット導入の壁である、イニシャルコスト高についての解決提案がロボットの多能工化です。ロボットを多能工化するにあたっては、安全性やビジョン・学習機能、エンドエフェクターの交換など検討しなければならない点が多数あります。これらをお客様と共に検討し解決する事で、24時間稼働できるロボットだからこその経済的メリットを活かせます。 Flow of system construction システム構築の流れ 事前検討 自動化に関するニーズをまとめる。 予算規模を勘案しながら概算見積を立て、投資回収の目安を検討する。 成果物の例:要求仕様書 / 構想イメージ図 / 概算見積書 企画構想 現状の作業工程における課題を抽出し、その原因を分析する。 整理した課題の解決手段を検討し、ロボットシステム全体を構想する。 システム構築の実施計画を作成する。 成果物の例:現状分析資料 / 全体構想図 / 実施計画書 仕様定義 実施計画に基づき、達成手段や実現方法を要求仕様として定義する。 システム全体と処理の流れを決定し、信頼性・利用性・保守性・復旧性の観点から精査する。 成果物の例:仕様定義書 / システムフロー図 / プロジェクト計画書 設計 ( 基本・詳細 ) 具体的なロボットシステムの方式や詳細の設計を行い、運用と能力の妥当性を検証する。 リスクアセスメントを行い、安全性確保に関する方針を策定する。 成果物の例:全体レイアウト図 / 図面一式 / 納入前テスト計画書 / 残留リスク報告書 製造・納入前テスト 設計に基づきロボットシステムの製造やプログラミングを行う。 実稼動環境への据付けや調整を行い、内部テストを経て、総合確認を行う。 成果物の例:ロボット・自動機一式 / プログラム一式 / 完成図書 / 操作マニュアル 本稼働開始 製造・納入前テスト ロボットシステム稼動後も定期点検を行い、不具合があれば修正する。 ロボットシステムの障害発生時に復旧支援を行う。 成果物の例:作業報告書 Case study 導入事例 ロボット 2023.08.21 ロボット 人とロボットの協力で生産性向上!協働ロボットが作業負担を軽減 ロボット 2023.08.21 ロボット 安全性重視!協働ロボットが危険作業の代行をサポート ロボット 2023.08.21 ロボット 効率的な物流作業を実現!ロボットとの協働で物流プロセスを改善 Other services その他のサービス AI (人工知能) 画像処理